![]() "Thymio VPL" est un outil de programmation visuel permettant de combiner des blocs "événement" et des blocs "action". Il fait parti d'un ensemble d'outils, "Aseba", comprenant, entre autres, le logiciel "Blockly" (programmation visuelle par assemblage de blocs), développé par Google.
"Thymio VPL" est un outil de programmation visuel permettant de combiner des blocs "événement" et des blocs "action". Il fait parti d'un ensemble d'outils, "Aseba", comprenant, entre autres, le logiciel "Blockly" (programmation visuelle par assemblage de blocs), développé par Google.
"Aseba" est téléchargeable à cette adresse :
Pour la suite nous utiliserons "Thymio VPL" pour explorer la programmation événementielle. Il est également possible d'utiliser "Blockly4Thymio" que nous avons survolé rapidement dans le chapitre "Programmation séquentielle avec Thymio".
Le "mode avancé" du logiciel ne sera pas abordé dans cet atelier.

Prise en main du logiciel "Thymio VPL"⚓
L'interface
La carte de référence

Le code couleur des capteurs⚓
Dans VPL, les capteurs de Thymio peuvent être paramétrés dans 3 états différents (rouge, noir et gris). Il est primordiale de comprendre ce qui est associé à chacune des couleurs avant de se lancer dans la réalisation d'un programme nécessitant l'usage des capteurs (programmation événementielle).
![]() une action va se déclencher si le capteur détecte quelque chose.
une action va se déclencher si le capteur détecte quelque chose.
![]() une action va se déclencher si le capteur ne détecte rien.
une action va se déclencher si le capteur ne détecte rien.
![]() si un autre capteur du même bloc est paramétré en rouge ou noir, aucune action n'est associée à ce capteur « gris » (qu'il détecte quelque chose ou pas) ; si tous les capteurs du même bloc sont paramétrés en gris ; l'action associée sera effectuée en permanence.
si un autre capteur du même bloc est paramétré en rouge ou noir, aucune action n'est associée à ce capteur « gris » (qu'il détecte quelque chose ou pas) ; si tous les capteurs du même bloc sont paramétrés en gris ; l'action associée sera effectuée en permanence.
Complément :
Lorsqu'un capteur de proximité est programmé en noir, on dit habituellement qu'une action lui sera associée s'il ne détecte rien. En réalité, le capteur est assez sensible et peut détecter des objets éloignés. Le programme applique des seuils de détection qui sont personnalisables dans le mode expert de VPL. Dans le mode basique, lorsqu'il est programmé en noir, une action sera associée au capteur s'il ne détecte rien ou si ce qu'il détecte est au-delà du seuil. De la même façon, lorsque le capteur est programmé en rouge, une action peut lui être associée si ce qu'il détecte est en deçà du seuil.
Défis⚓
Défi n°1 : Thymio avance s'il ne détecte rien et recule s'il détecte quelque chose. S'il approche du bord de la table, il ne tombe pas.
Défi n°2 : Thymio suit une ligne noire et s'arrête au bout (utiliser les 2 posters).
Défi n°3 : Thymio fait du ski sur la piste Yeti (utiliser le poster Yeti).
Défi n°4 : Thymio se déplace dans un environnement clos avec des obstacles qu'il doit éviter, et sans toucher les "murs" de l'espace dans lequel il évolue (utiliser les Kapla).
Défi n°5 (la voiture autonome) : Thymio roule de manière autonome sur un circuit ovale dans le même sens. Si un ou plusieurs piétons traversent le circuit, Thymio doit les éviter ou s'arrêter s'il ne peut pas pour les laisser passer et repartir une fois le danger écarté (utiliser le poster).
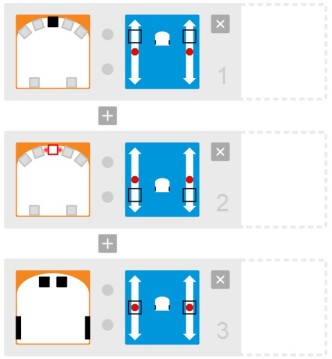
Solution du défi n°1⚓
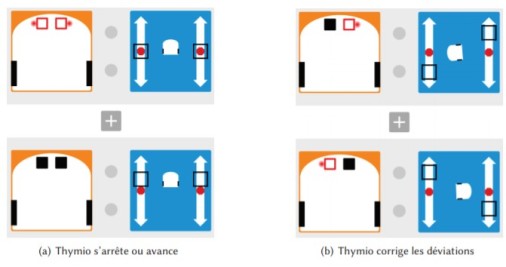
Solution du défi n°2⚓
Solution du défi n°3⚓

Solution du défi n°4⚓

Solution du défi n°5⚓

